Contemporary high-end cars, in pursuit of high performance, low fuel consumption, low radiation, improve comfort, convenience and safety, require a large number of electronic devices. The emergence of each new vehicle system or electrical function is accompanied by an increase in connectivity. The emerging fields of information communication and drive information systems need to integrate multiple technologies to enhance car safety, communication capabilities, convenience and entertainment. These technologies involve dynamic navigation, wireless connectivity/Internet access, voice processing, car radios, virtual instrument panels, collision avoidance systems, and the like. Through these electronic devices, cars interact with in-vehicle systems, other vehicles, drives and extended communication networks, and support a variety of in-vehicle applications. There is no doubt that these systems also require a car-specific power supply solution.
Car bus
The pioneer of automotive complex electronics is the engine control system. It has been expanded and is now known as the Power-Train system, which includes transmission control and advanced in-vehicle diagnostics. The vehicle power chain bus requires high speed and economical data transmission capability.
As shown in Table 1, SAE originally defined three types of data communication vehicle networks: low, medium and high speed. Controller Area Network (CAN) and SAE J-1850 have always dominated, but are not the only bus architecture.
This article refers to the address: http://
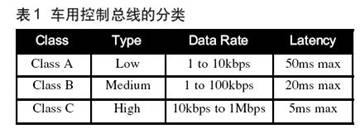
SAE J-1850 includes various versions originally developed by all three US automakers. CAN is a serial, asynchronous, multi-master communication protocol used to connect electronic control modules for automotive and industrial applications. CAN is designed for automotive applications that require advanced data integration and data rates up to 1 Mbps.
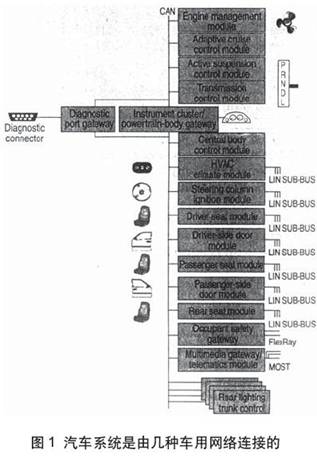
CAN has both low and high speed implementations that use different voltages to communicate on a pair of wires, commonly referred to as a high speed physical layer and a low speed physical layer. When one of the two wires fails due to a short circuit or one way, the low speed architecture becomes a single wire operating system (so-called offline). Since the circuit needs to have this function, the implementation cost of this architecture is very expensive when the bus speed exceeds 125 Kbps. Therefore, 125Kbps is the boundary between high speed and low speed CAN. Figure 1 shows the CAN connection method for supporting other vehicle networks.
For some automotive applications, such as motor control in the body electronics system, even lower buses can be used. The Local Interconnect Network (LIN) is a UART-based, single-master, multi-slave network architecture originally developed for automotive sensor and actuator network applications. LIN offers an inexpensive network alternative for connecting in-vehicle motors, switches, sensors and lights. The LIN master node connects the LIN network to the advanced network (such as CAN), extending the role of the network to each sensor and actuator (Table 2).

Wire-driven systems require a lot of power when fully equipped. The term "by-wire" means that the control system has completely eliminated the mechanical or hydraulic connection, and the motor actuator is driven electronically between the control units. Wire drive includes wire adjustment, wire brakes, wire shifting and wire driving, especially for automatic parking systems.
In order to implement such high power control systems, a fault tolerant, time triggered architecture is required. Currently, there are three types of agreements that compete for leadership in this area. Flex Ray uses fiber optics, and of course it can work on copper wires with data rates up to 10Mbps. The other is TTP (Time Trigger Protocol) using copper wire, the data rate is only 2Mbps, but researchers at Vienna University are exploring the use of fiber. The third protocol, TT-CAN, supports both "time-triggered" and "event-triggered" applications.
The Automotive Multimedia Interface Alliance, or AMI-C, is developing multimedia standards for mobile information and entertainment systems. AMI-C's main focus is on multi-target information and multimedia technologies, and it seeks to address the use of Bluetooth, IEEE-1394 and Media Oriented System Transport (MOST)-based in-vehicle networks. Bluetooth provides a wireless connection to the vehicle environment; IEEE E-1394 has connected several multimedia products in a consumer environment; MOST is an optical media based protocol developed for automotive video and audio streaming data.
For all network protocols discussed above (except LIN), a more powerful microprocessor is required to implement all system functions.
Special requirements for power supply
In automotive applications, voltage accuracy over a wide range of supply voltages and wide temperature ranges eliminates the need for special power supply circuits. Two prominent examples are the physical layer power requirements and the various voltage powering sequences required by advanced microprocessing.
Simple physical layer devices may not be suitable for some automotive applications. For example, all automotive modules require a regulated power supply. Sometimes a local switch or sensor wakes up the module and goes from sleep to active operation. The switch or sensor operates on a vehicle battery. In order to simplify the power supply design for physical layer applications in vehicles, dedicated power ICs have been developed, such as Motorola's System Bias Chip (SBC) family. The MC33389 combines the CAN physical layer function and voltage regulator function of the car CAN connection with a built-in independent watchdog timer and local wake-up circuit for maximum flexibility with minimal components (Figure 2). Combining these functions in a single package requires advanced mixed-signal semiconductor processes such as Motorola's SmARTMOSTM process. The integrated design reduces assembly costs, increases reliability, and increases design flexibility.

The MC33389 combines a low-speed fault-tolerant CAN transceiver with a dual low-dropout regulator with current load capability of 100mA and 200mA, respectively. The IC also features a current limiter and pre-alarm over-temperature detector, as well as a 5V output voltage V1 regulator. The V1 comes with a monitoring circuit and reset function.
The IC provides three modes of operation (normal, standby, and sleep) that are out of the CAN interface operating mode and provides access to a low speed 125K baud rate fault tolerant CAN interface. The chip's DC operating voltage is as high as 27V, and can withstand the maximum instantaneous voltage of 40V. In addition, the IC can operate in the temperature range of -40 ° C ~ 125 ° C for automotive extreme applications.
The Digit LED Display is one type of display screen. By inputting relative current to its different pins, it will light up, so as to display all the parameters that can be represented by numbers, such as time, date, temperature, etc.
Because of its low price and simple use, it is widely used in electrical appliances, especially in the field of household appliances, such as air conditioners, water heaters, refrigerators, etc. Most water heaters use Digit LED Display, and other household appliances also use LCD and fluorescent screens.
led display,different color ,wide usage ,High intensity and reliability
Wuxi Ark Technology Electronic Co.,Ltd. , https://www.arkledcn.com